遠心鏡頭與普通工業鏡頭拍攝效果對比
在工業應用上用到的鏡頭通常有普通工業鏡頭和遠心工業鏡頭,二者之間的區別在於,遠心鏡頭是平行光路設計,主要是為糾正傳統工業鏡頭視差而設計,它可以在一定的物距範圍內,使得到的圖像放大倍率不會變化,即不會產生近大遠小的情況,這對被測物體不在同一物面上的情況是非常重要的應用。而普通工業鏡頭在拍攝時,被測物體(或CCD晶片)離鏡頭距離的遠近不一致,會造成放大倍率不一樣,目標物體離鏡頭越近(工作距離越短),所成的像就越大。在使用普通鏡頭進行測量時,會存在如下問題:
1.由於被測物體不在同一個測量平面,而造成放大倍率的不同;
2.鏡頭畸變大;
3.視差,也就是當物距變大時,對物體的放大倍數也改變;
4.鏡頭的解析度不高;
5.由於視覺光源的幾何特性,而造成的圖像邊緣位置的不確定性。
遠心鏡頭可以有效解決普通工業鏡頭存在的上述問題,而且沒有此性質的判讀誤差,因此可用在高精度測量、度量計量等方面。無論何處,在特定的工作距離,重新調焦後會有相同的放大倍率,因為遠心鏡頭的最大視場範圍直接與鏡頭的光欄接近程度有關,鏡頭尺寸越大,需要的視場就越大。遠心鏡頭是一種高端的工業鏡頭,像質出眾,畸變小,特別適合於尺寸測量的應用,可配合軟體進行精密測量。
一、遠心鏡頭與普通工業鏡頭拍攝小孔對比
|
圖1 |
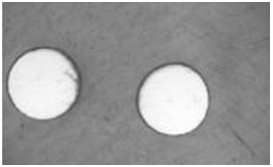
圖2 |
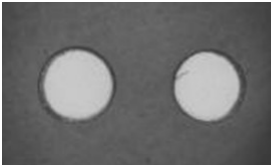
在相同的拍攝條件下,圖1為普通連續變倍工業鏡頭拍攝。由於普通鏡頭存在的視覺聚焦誤差,小孔內壁易產生陰影,對於提取小孔內邊緣造成影響,圖像精度不高。
圖2用連續變倍遠心鏡頭拍攝,因為遠心鏡頭特有的平行光特性,可以確保拍攝出的小孔輪廓清晰,資料準確,不需要對圖像做過多校正。
對比可見遠心鏡頭比普通工業鏡頭更適合檢測有厚度小孔的孔徑,以及對邊緣提取要求高的測量應用行業。
二、遠心鏡頭與普通工業鏡頭拍攝齒輪對比
|
圖3 |
圖4 |


由於普通工業鏡頭的入光和成像光線不是平行光設計,存在視覺誤差。圖3由普通工業鏡頭拍攝出來的圖片,齒輪圓孔的內壁可見,整個齒輪沿著中心凸起,孔徑和外邊沿資料不真實,不易判讀邊緣,需要很複雜的演算法校正。
遠心鏡頭的光路是平行光設計,從圖4可以看出,用遠心鏡頭拍攝齒輪,齒輪的圓孔內邊緣和外齒輪邊緣輪廓清晰,孔徑資料真實,不存在孔內壁可見和外壁畸變的現象,無需對圖像校正。
三、遠心鏡頭和普通工業鏡頭拍攝模具對比
|
圖5 |
圖6 |

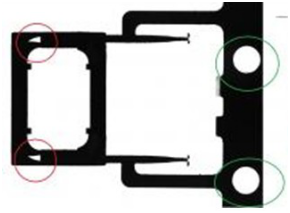
圖5,用普通的鏡頭拍攝,由於視覺誤差和聚焦不准,所以在拍攝塑膠模具的透氣孔時(紅圈圈定),出現內壁可見,邊緣提取不清晰,有陰影的現象,對識別造成影響,資料不準確。
圖6,用遠心鏡頭拍攝,由於遠心鏡頭具有平行光的遠心特性,不存在視覺誤差,所以在拍攝塑膠模具的透氣孔時(紅圈圈定),內壁邊緣清晰,資料準確。拍攝圓孔(綠色)時,孔邊緣清晰,易於檢測到毛刺,以及檢測孔徑大小等。
遠心鏡頭是一種高端的機器視覺鏡頭,其目的就是消除由於被測物體(或CCD晶片)離鏡頭距離的遠近不一致,造成放大倍率不一樣。分為:物方遠心鏡頭、像方遠心鏡頭和雙側遠心鏡頭三大類。
由於遠心鏡頭具有獨特的技術優勢,目前,在機械零件測量、塑膠零件測量、玻璃製品與醫藥零件測量、電子元件測量等高精度檢測方面的需求,對於精密測量的場合特別適用。以下為您詳細解答其應用中的八大問題。
1、遠心鏡頭有何優點?
遠心鏡頭的設計是采Telecentric原理,低失真、無視角誤差,較適合工業上量測應用,所以價位較一般CCTV鏡頭高。遠心鏡頭另有同軸鏡頭設計,提供不同工作距離,不同放大倍率供選擇。
2、遠心鏡頭為何低倍率鏡頭價格反而高?
因為Telecentric鏡頭為了要減少失真,讓平行光進入,所以鏡頭設計必須比被照體大,所以低倍率鏡頭通常口徑都很大,所需的鏡片材料成本較高,所以價格較高。
3、同軸光鏡頭打同軸光時,中間亮度較亮旁邊整暗,是何原因?如何補救?
因為同軸光鏡頭的投射光線集中於中心5~6㎜左右,如果看的範圍較大,邊緣附近光線較暗,這是低倍率同軸光鏡頭常有的現象。可以外加環形光源來補足光線不夠地方。
4、遠心鏡頭可否搭配CCTV用的2倍鏡使用?
可以,但是影像品質變差,所需光強度更強,不建議使用。
5、遠心鏡頭規格上,標示鏡頭分解能(解析力)是代表什麼意思?
鏡頭解析力的定義是鏡頭能看清楚最小物體邊緣的能力,如果低於此分解能,就無法看清楚了。須另外找解析力更高的鏡頭,如高倍顯微物鏡。
6、遠心鏡頭景深為何不能很長?
遠心鏡頭設計時即考慮到景深、倍率、光圈、工作距離等參數取得最佳點,所以景深均為固定的數值,如要增長景深,而犧牲別的參數,會影響鏡頭品質。
7、如果要看到1μm的物體可用何種鏡頭?
要看到小於1μm以下物體,必須用高倍顯微物鏡,但工作距離變得很小(約7㎜),景深變得很淺了。
8、用遠心鏡頭所放大的影像到底是多少倍?
影像實總際放大倍率是等於鏡頭光學倍率×Monitor放大倍率,Monitor放大倍率是Monitor對角線除上CCD Sensor對角線(1/3〞CCD Sensor投射到14吋Monitor是59.3倍)。
鏡頭的選擇過程,是將鏡頭各項參數逐步明確化的過程。作為成像器件,鏡頭通常與光源、相機一起構成一個完整的圖像採集系統,因此鏡頭的選擇受到整個系統要求的制約。一般地可以按以下幾個方面來進行分析考慮。
一、波長、變焦與否
鏡頭的工作波長和是否需要變焦是比較容易先確定下來的,成像過程中需要改變放大倍率的應用,採用變焦鏡頭,否則採用定焦鏡頭就可以了。
關於鏡頭的工作波長,常見的是可見光波段,也有其他波段的應用。是否需要另外採取濾光措施?單色光還是多色光?能否有效避開雜散光的影響?把這幾個問題考慮清楚,綜合衡量後再確定鏡頭的工作波長。
二、特殊要求優先考慮
結合實際的應用特點,可能會有特殊的要求,應該先予明確下來。例如是否有測量功能,是否需要使用遠心鏡頭,成像的景深是否很大等等。景深往往不被重視,但是它卻是任何成像系統都必須考慮的。
三、工作距離、焦距
工作距離和焦距往往結合起來考慮。一般地,可以採用這個思路:先明確系統的解析度,結合CCD圖元尺寸就能知道放大倍率,再結合空間結構約束就能知道大概的物像距離,進一步估算鏡頭的焦距。所以鏡頭的焦距是和鏡頭的工作距離、系統解析度(及CCD圖元尺寸)相關的。
四、像面大小和像質
所選鏡頭的像面大小要與相機感光面大小相容,遵循“大的相容小的”原則——相機感光面不能超出鏡頭標示的像面尺寸——否則邊緣視場的像質不保。
像質的要求主要關注MTF和畸變兩項。在測量應用中,尤其應該重視畸變。
五、光圈和介面
鏡頭的光圈主要影響像面的亮度。但是現在的機器視覺中,最終的圖像亮度是由很多因素共同決定的:光圈、相機增益、積分時間、光源等等。所以為了獲得必要的圖像亮度有比較多的環節供調整。
鏡頭的介面指它與相機的連接介面,它們兩者需匹配,不能直接匹配就需考慮轉接。
六、鏡頭的其它類別:
線陣鏡頭:配合線陣相機使用的鏡頭。採用掃描式的工作方式,需要鏡頭與目標相對運動,每次曝光成像一條線,多次曝光組成一幅圖像。線陣掃描成像的特點:CCD線陣方向的圖像解析度固定,而在目標的運動方向上,空間採樣頻率與運動的相對速度有關。
從成像的角度講,線陣鏡頭和其它類型的鏡頭並沒有本質的差異。只是對鏡頭的使用方式不同而已。
顯微鏡頭:為了看清目標的細節特徵,顯微鏡頭一般使用在高解析度的場合。它們基本的特點是工作距離短,放大倍率高,視場小。
遠心鏡頭:物方主光線平行於光軸主光線的會聚中心位於物方無限遠,稱之為物方遠心光路。作用:可以消除物方由於調焦不準確帶來的測量誤差。
工業鏡頭的選擇過程,是將工業鏡頭各項參數逐步明確化的過程。作為成像器件,工業鏡頭通常與光源、相機一起構成一個完整的圖像採集系統,因此工業鏡頭的選擇受到整個系統要求的制約。一般地可以按以下幾個方面來進行分析考慮。
波長、變焦與否工作波長和是否需要變焦是比較容易先確定下來的,成像過程中需要改變放大倍率的應用,採用變焦鏡頭,否則採用定焦鏡頭就可以了。
特殊要求優先考慮特殊的要求應該先予明確下來:例如是否有測量功能,是否需要使用遠心鏡頭,成像的景深是否很大等。(景深往往不被重視,但是它卻是任何成像系統都必須考慮的)
工作距離、焦距工作距離和焦距往往結合起來考慮。一般可以採用這個思路:先明確系統的解析度,結合CCD圖元尺寸就能知道放大倍率,再結合空間結構約束就能知道大概的物像距離,進一步估算工業鏡頭的焦距。
像面大小和像質像面大小要與相機感光面大小相容,遵循“大的相容小的”原則——相機感光面不能超出鏡頭標示的像面尺寸——否則邊緣視場的像質不保。
像質要求主要關注MTF和畸變兩項。(在測量應用中,尤其應該重視畸變)
光圈和介面光圈主要影響像面的亮度。但是現在的機器視覺中,最終的圖像亮度是由很多因素共同決定的:光圈、相機增益、積分時間、光源等,所以為了獲得必要的圖像亮度有多種方式可調整。
工業鏡頭的介面指它與相機的連接介面,它們兩者需匹配,不能直接匹配就需考慮轉接。
成本和技術成熟度如果以上因素考慮完之後有多項方案都能滿足要求,則可以考慮成本和技術成熟度,進行權衡擇優選取。
例如,要給硬幣檢測成像系統選配工業鏡頭,約束條件:相機CCD 2/3英寸,圖元尺寸4.65μm,C口。工作距離大於200mm,系統解析度0.05mm。光源採用白色LED光源。
基本分析如下:與白色LED光源配合使用的,鏡頭應該是可見光波段;沒有變焦要求,選擇定焦鏡頭就可以了。
用於工業檢測,其中帶有測量功能,所以所選鏡頭的畸變要小。
工作距離和焦距:
成像的放大率M=4.65/(0.05*1000)=0.093
焦距f’=L*M/(M+1)=200*0.093/1.093=17mm
物距要求大於200mm,則選擇的鏡頭要求焦距應該大於17mm。
選擇鏡頭的像面應該不小於CCD尺寸,即至少2/3 英寸。
鏡頭的介面要求是C口,能配合相機使用。光圈暫無要求。
從以上幾方面的分析計算可以初步得出這個鏡頭的“輪廓”:焦距大於17mm,定焦,可見光波段,C口,至少能配合2/3英寸CCD使用,而且成像畸變要小。
遠心光學ES Star就完全滿足上述要求,而且在應用中的亮點遠不止於此。
CCD感測器是一種高感光度的半導體器件,它能夠根據照射在其面上的光線產生相應的電荷信號通過模數轉換器轉換成“0”或“1”的數位信號。CCD上植入的微小光敏物質稱作圖元(Pixel)。一塊CCD上包含的圖元數越多,其提供的畫面解析度也就越高。CCD的作用就像膠片一樣,但它是把圖像圖元轉換成數位信號。
目前,工業相機通常使用CCD感測器作為像面接收器,CCD從功能上可分為面陣CCD和線陣CCD兩大類,其工作區域的形狀分別為矩形或線形。在鏡頭的參數中,也經常使用感測器的大小來表示視場大小。
面陣CCD的結構比較複雜,是由許多圖元單元組成的一個矩形陣列,每個圖元單元都是一個方形感測器。面陣CCD的大小通常是以其對角線的長度來表示的。目前常用的面陣CCD有:
|
CCD尺寸 |
水準(mm) |
垂直(mm) |
對角線(mm) |
|
1英寸 |
12.8 |
9.6 |
16 |
|
2/3英寸 |
8.8 |
6.6 |
11 |
|
1/2英寸 |
6.4 |
4.8 |
8 |
|
1/3英寸 |
4.8 |
3.6 |
6 |
|
1/4英寸 |
3.2 |
2.4 |
4 |
線陣CCD也是由許多圖元單元組成,與面陣CCD不同的是,這些圖元單元排成一個單列。線陣CCD有單溝道和雙溝道之分。線陣CCD的大小則是以圖元單元的數量和大小來表示。線陣感測器的規格有1K、2K、4K、8K、12K等,圖元單元有5µm、7µm、10µm、14µm等。
我們在選擇鏡頭時必須注意:CCD的工作區域必須包含在鏡頭所確定的像面圓形區域之內。即小尺寸靶面的CCD可使用大尺寸靶面的CCD攝像機鏡頭,反之則不行。原因是:例如1/2″CCD攝像機採用1/3″鏡頭,則進光量會變小,色彩會變差,甚至圖像會出現缺損;反之,則進光量會變大,色彩會變好,圖像效果也會更好。當然,綜合各種因素,攝像機最好還是選擇與其相匹配的鏡頭。